A new year and a new decade means time for reflection. I try to do this more often than every ten years, but this seems to be a good time to discuss in public.
I’ve split this into three phases. Short-term is what I’d like to do in the coming month or so. This year is my goals for roughly a year, while decade really just means long-term.
Short-Term
Promote an ensure that foss-north 2020 is as successful as last year. You can help by submitting your paper. We’re also looking for sponsors and projects for the community day.
There is also some short-term work for foss-north, i.e. getting tickets sales up and running via our own infrastructure instead of using Eventbrite.
While planning foss-north, I’d also like to keep foss-gbg and gbgcpp active during the spring. Here, the travel part of my work means that I’m seriously short on time. The ambition would be ~10 meetups, but realistically it will be ~5-6.
A part from organizing events, I’m also attending. The next big one is fosdem, which I’m really looking forward to.
Then we have this blog. My goal is to write more, and I’ve been at it for a few months. I’ll try to keep this up.
When it comes to personal health, I try to run regularly. Since my little health dip last autumn, I’ve been fighing to get back and the current goal is to do 5km rounds every week.
This Year
For foss-north, my aim is to do at least one themed event, much like the cancelled foss-north Iot and Security Day planned for October last year. This event will be in the Øresund region or in Stockholm. Feel free to reach out to me if you want to help out.
On a 12 month time frame, I have some professional goals. I’m working with Mbition together with an amazing group of people. We are building a platform for future in-car software. There my goal is to be more focused in what I’m doing – to do more of what I do well better, and less of what I do badly.
Kuro Studio is also in an interesting phase, having a couple of start-ups underway and a constructive partnership in an interesting phase. Again, my personal goal here is to focus more.
Finally, I have my little one-man-box, Koderize, where I do smaller assignments. Here, my goal is to do a few more articles for various magazines, and possibly to find some small development project. Let’s see what I bump into.
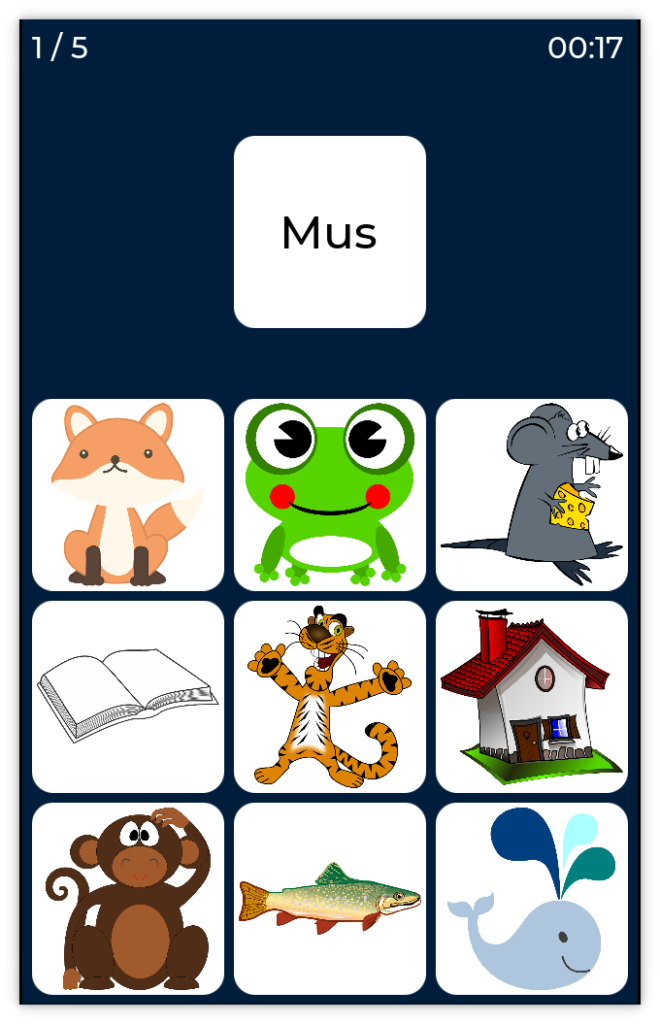
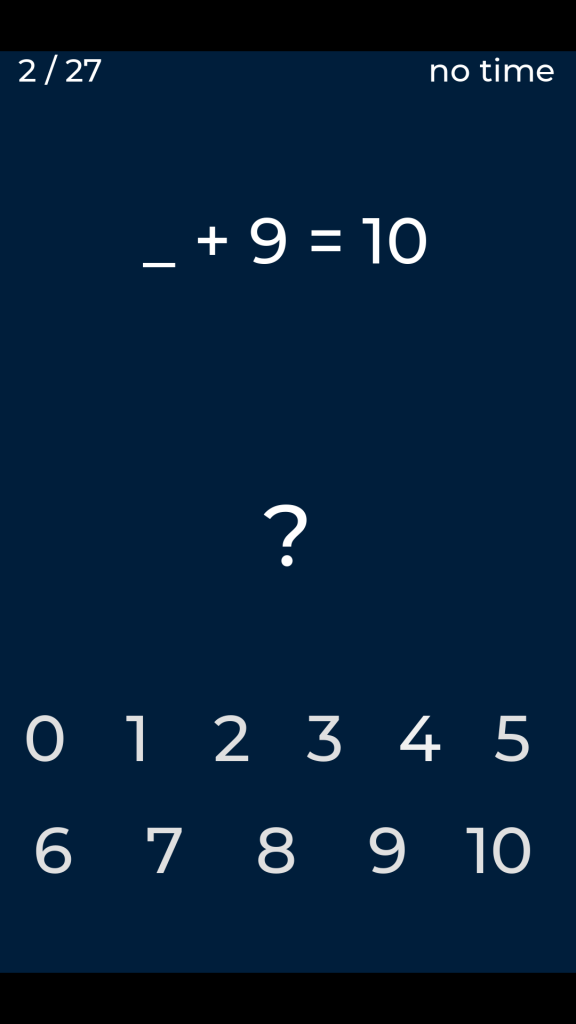
Then we come to actual coding. A while ago I came to the conclusion that I need to down-size my projects a bit to actually finish them. Hence Mattemonster an app to teach basic maths for Android created using Godot. It started as a way to get my son to enjoy practicing maths, but this time I polished it just a little bit more and published it on the Play Store. I still have some features on my todo list, as well as publishing it to f-droid.
I also want to spend some time writing a proper Qt desktop application as well. I’ve got some basic ideas, but nothing crisp enough. I’ll probably not have time to dive into this unless I get a really good idea.
My health target this year is to do 5km under 30 minutes, and comfortably do 10km. The stretch goal is to do 10km under the hour.
Next Decade
When looking at a longer time-frame than a year, the goals become fuzzier. This might seem like speculation, but I embrace the fuzziness and use them to prioritize my short-term goal. If I run into something that seems fun, I map it to my long term goals to determine if I should do it or not.
On this time scale, I’d like for foss-north and foss-gbg, I want them to be more independent of me as an individual. To create more a role based setup and stable economical environment (currently the margins are super slim). If I can enjoy a foss-north conference as a visitor in 2030, I’ve achieved this.
For my Mbition work, I want us to reach multiple releases. The reason for the automotive industry to take on more responsibility for software is to increase the reusability. That is why it is key for Mbition to do multiple releases. Then we have proven that our existence makes sense.
For Kuro Studio, we want to continue doing start-ups, more partnerships, building a larger team, meeting more people, and doing more awesome stuff. Getting Kuro properly off the ground is very high on my list of priorities.
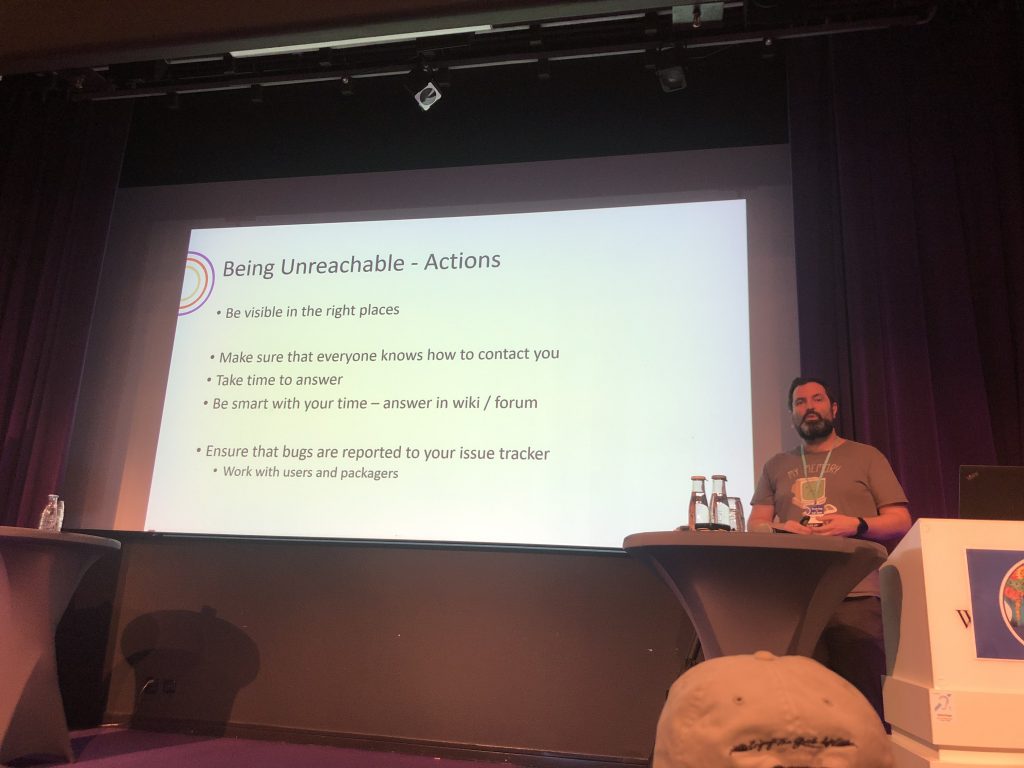
Another professional goal I have is to speak more at conferences and speak more about how open source is the way to do software. Transparency is the only way to ensure proper quality, maintainability, and trust – and what better way than open source is there to be transparent.
Since we’re on the really long-term goals part of this post, I’d also like to write another book. I’m not sure about the topic, nor when, but I would not consider myself a proper writer with only one title to my name.
Health wise, it is harder to set a more clear goal than staying healthy, which is what I intend to do. I’ll try to keep running and staying in reasonable shape. If I can still do 10km at a reasonable pace in 2029, when I turn 50, I’m happy.
Next Up
At the end of the day, these are goals and ambitions, not a roadmap for my life. Next up is fosdem. I hope to see you there!